09. FastSLAM Instances
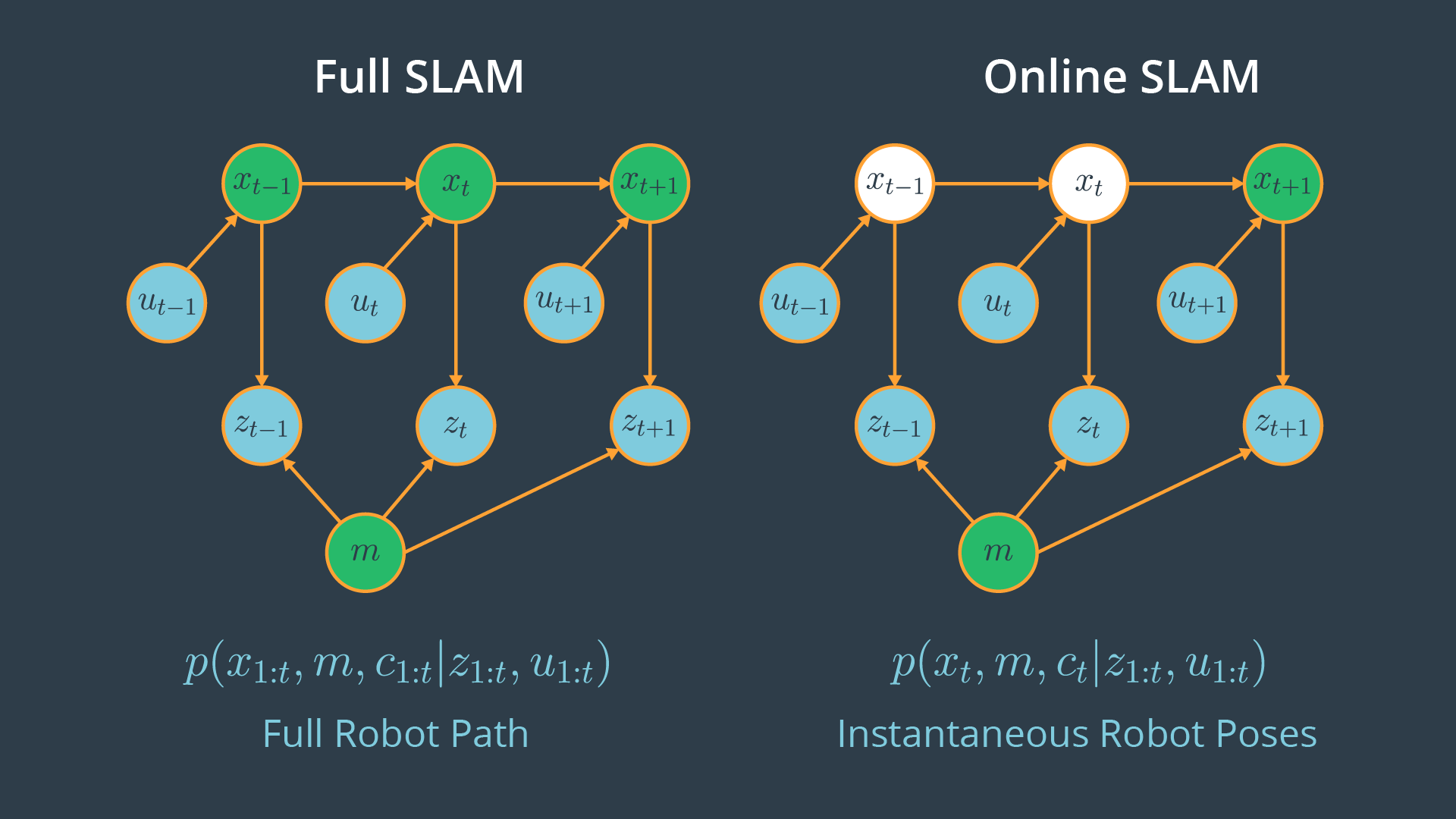
We’ve seen that the FastSLAM algorithm can solve the full SLAM problem with known correspondences. Since FastSLAM uses a particle filter approach to solve SLAM problems, some roboticists consider it a powerful algorithm capable of solving both the Full SLAM and Online SLAM problems.
- FastSLAM estimates the full robot path, and hence it solves the Full SLAM problem.
- On the other hand, each particle in FastSLAM estimates instantaneous poses, and thus FastSLAM also solves the Online SLAM problem.
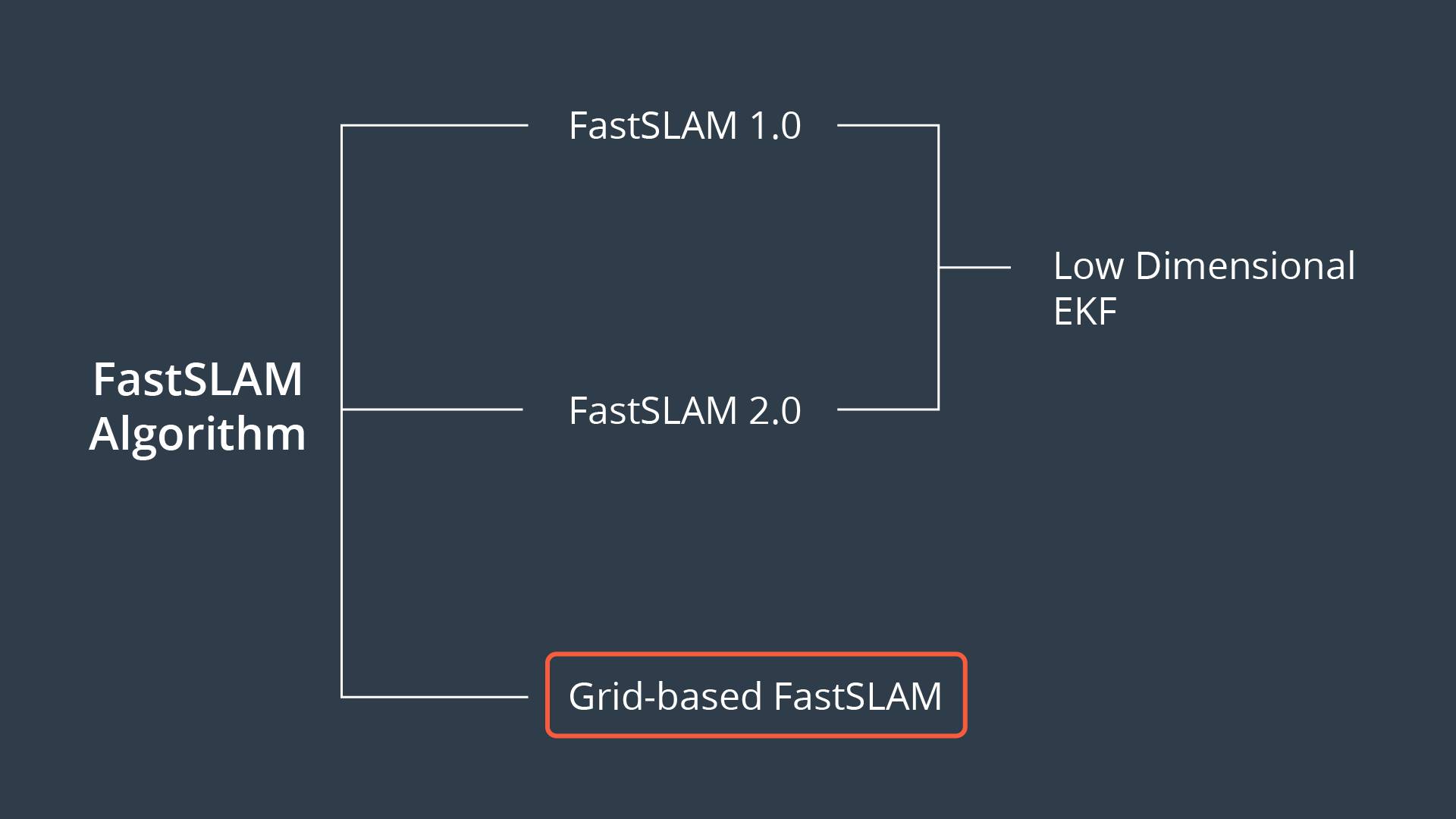
Now, three different instances of the FastSLAM algorithm exist.
FastSLAM 1.0
The FastSLAM 1.0 algorithm is simple and easy to implement, but this algorithm is known to be inefficient since particle filters generate sample inefficiency.
FastSLAM 2.0
The FastSLAM 2.0 algorithm overcomes the inefficiency of FastSLAM 1.0 by imposing a different distribution, which results in a low number of particles. Keep in mind that both of the FastSLAM 1.0 and 2.0 algorithms use a low dimensional Extended Kalman filter to estimate the posterior over the map features.
Grid-based FastSLAM
The third instance of FastSLAM is really an extension to FastSLAM known as the grid-based FastSLAM algorithm, which adapts FastSLAM to grid maps. In this lesson, you will learn grid-based FastSLAM. For more information on the fastSLAM 1.0 and 2.0 algorithms refer to the probabilistic robotics book.